

: A Scalable AI Method for Robotic Studying from Heterogeneous Knowledge")
In at present’s world, constructing robotic insurance policies is tough. It typically requires accumulating particular information for every robotic, job, and surroundings, and the discovered insurance policies don’t generalize past these particular settings. Current progress in open-source, large-scale information assortment has made pre-training on large-scale, high-quality, and numerous information potential. Nonetheless, in robotics, heterogeneity poses a problem as a result of robots differ in bodily type, sensors, and working environments. Each proprioception and imaginative and prescient data are essential for complicated, contact-rich, long-horizon behaviors in robotics. Poor studying of such data can result in overfitting behaviors similar to repeating motions for a selected scene, job, and even trajectory.
The present strategies in robotic studying contain accumulating information from a single robotic embodiment for a selected job and coaching the mannequin upon it. That is an in depth strategy, and the principle limitation of that is that the mannequin can’t be generalized for varied duties and robots. Strategies like pre-training and switch studying use information from varied fields, similar to laptop imaginative and prescient and pure language, to assist fashions study and adapt to newer duties. Current works present that small projection layers can be utilized to mix the pre-trained function areas of the muse fashions. Totally different from different fields, robotics has much less information amount and variety however way more heterogeneity. Additionally, latest developments mix multimodal information (pictures, language, audio) for higher illustration studying.
A gaggle of researchers from MIT CSAIL and Meta carried out detailed analysis and proposed a framework named Heterogeneous Pre-trained Transformers (HPT). It’s a household of structure designed to scalably study from information throughout heterogeneous embodiments. HPT’s essential operate is to create a shared understanding or illustration of duties that can be utilized by completely different robots in varied situations. As a substitute of coaching a robotic from scratch for every new job or surroundings, HPT permits robots to make use of pre-learned information, making the coaching course of quicker and extra environment friendly. This structure combines the proprioception and imaginative and prescient inputs from distinct embodiments into a brief sequence of tokens, that are then processed to regulate robots for varied duties.
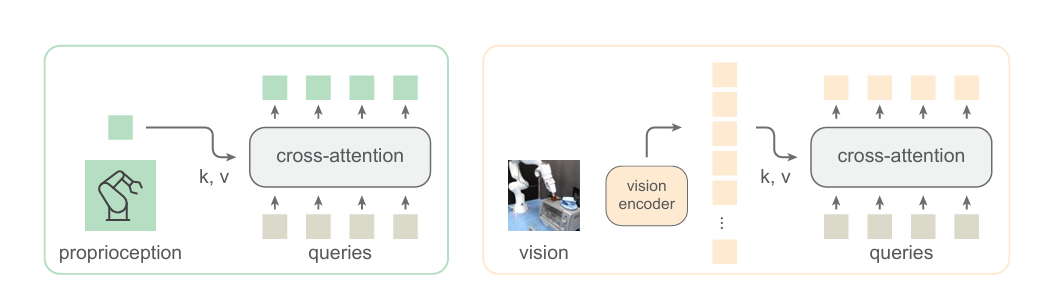
The structure of HPT consists of the embodiment-specific stem, the shared trunk, and the task-specific heads. HPT is impressed by studying from multimodal information and makes use of embodiment-specific tokenizers, often called stem, to mix varied sensor inputs similar to digicam views and physique actions information. The trunk is a shared mannequin and pre-trained throughout datasets and is transferred when adapting to new embodiments and duties which are unknown through the pre-training instances. Furthermore, it makes use of task-specific motion decoders to provide the motion outputs often called heads. After tokenizing every embodiment, HPT operates on a shared area of a brief sequence of latent tokens.
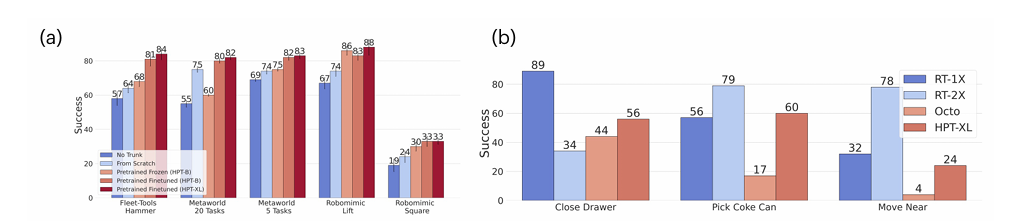
The scaling behaviors and varied designs of coverage pre-training have been investigated utilizing greater than 50 individual information sources and a mannequin dimension of over 1 billion parameters. Many out there embodied datasets in numerous embodiments, similar to actual robots, simulations, and web human movies, have been integrated into the pre-training course of. The outcomes confirmed that the HPT framework works effectively not solely with expensive real-world robotic operations but additionally with different varieties of embodiments. It outperforms a number of baselines and enhances the fine-tuned coverage efficiency by over 20% on unseen duties in a number of simulator benchmarks and real-world settings.
In conclusion, the proposed framework addresses the heterogeneity and mitigates challenges associated to robotic studying by leveraging pre-trained fashions. The tactic reveals vital enhancements in generalization and efficiency throughout many robotic duties and embodiments. Though the mannequin structure and coaching process can work with completely different setups, pre-training with diverse information can take an extended time to converge. This attitude in the direction of robotics can encourage future work in dealing with the heterogeneous nature of robotic information for robotic basis fashions!
Take a look at the Paper, Mission, and MIT Weblog. All credit score for this analysis goes to the researchers of this venture. Additionally, don’t overlook to observe us on Twitter and be part of our Telegram Channel and LinkedIn Group. In the event you like our work, you’ll love our e-newsletter.. Don’t Overlook to hitch our 55k+ ML SubReddit.
[Sponsorship Opportunity with us] Promote Your Analysis/Product/Webinar with 1Million+ Month-to-month Readers and 500k+ Group Members
Divyesh is a consulting intern at Marktechpost. He’s pursuing a BTech in Agricultural and Meals Engineering from the Indian Institute of Expertise, Kharagpur. He’s a Knowledge Science and Machine studying fanatic who needs to combine these main applied sciences into the agricultural area and resolve challenges.


