


Self-supervised studying on offline datasets has permitted massive fashions to achieve outstanding capabilities each in textual content and picture domains. Nonetheless, analogous generalizations for brokers performing sequentially in decision-making issues are tough to achieve. The environments of classical Reinforcement Studying (RL) are principally slender and homogeneous and, consequently, onerous to generalize.
Present reinforcement studying (RL) strategies typically practice brokers on mounted duties, limiting their means to generalize to new environments. Platforms like MuJoCo and OpenAI Fitness center concentrate on particular eventualities, limiting agent adaptability. RL relies on Markov Choice Processes (MDPs), the place brokers maximize cumulative rewards by interacting with environments. Unsupervised Setting Design (UED) addresses these limitations by introducing a teacher-student framework, the place the instructor designs duties to problem the agent and promote environment friendly studying. Sure metrics guarantee duties are neither too simple nor unimaginable. Instruments like JAX allow quicker GPU-based RL coaching by means of parallelization, whereas transformers, utilizing consideration mechanisms, improve agent efficiency by modeling complicated relationships in sequential or unordered knowledge.
To deal with these limitations, a workforce of researchers has developed Kinetix, an open-ended area of physics-based RL environments.
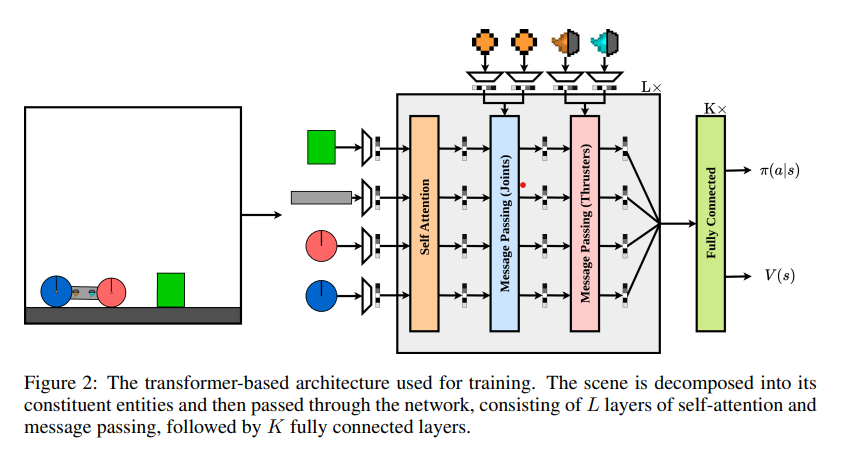
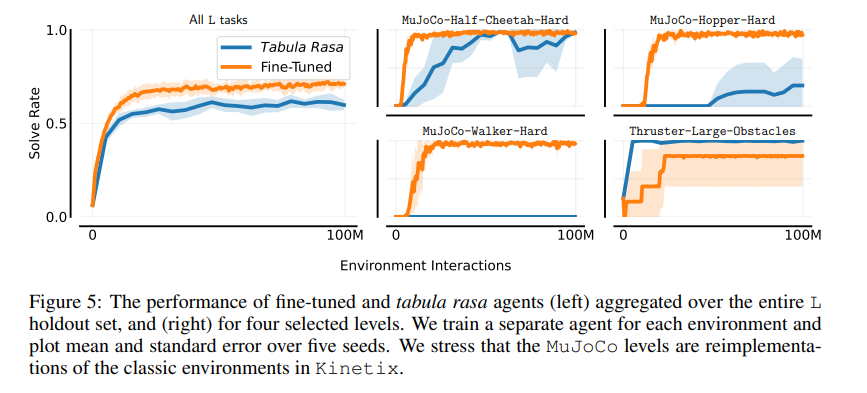
Kinetix, proposed by a workforce of researchers from Oxford College, can symbolize duties starting from robotic locomotion and greedy to video video games and traditional RL environments. Kinetix makes use of a novel hardware-accelerated physics engine, Jax2D, that enables for a budget simulation of billions of environmental steps throughout coaching. The skilled agent reveals robust bodily reasoning capabilities, having the ability to zero-shot resolve unseen human-designed environments. Moreover, fine-tuning this basic agent on duties of curiosity exhibits considerably stronger efficiency than coaching an RL agent tabula rasa. Jax2D applies discrete Euler steps for rotational and positional velocities and makes use of impulses and higher-order corrections to constrain instantaneous sequences for environment friendly simulation of diversified bodily duties. Kinetix is fitted to multi-discrete and steady motion areas and for a wide selection of RL duties.
The researchers skilled a basic RL agent on tens of tens of millions of procedurally generated 2D physics-based duties. The agent exhibited robust bodily reasoning capabilities, having the ability to zero-shot resolve unseen human-designed environments. Tremendous-tuning this demonstrates the feasibility of large-scale, mixed-quality pre-training for on-line RL.
In conclusion, Kinetix is a discovery that addresses the restrictions of conventional RL environments by offering a various and open-ended area for coaching, resulting in improved generalization and efficiency of RL brokers. This work can function a basis for future analysis in large-scale on-line pre-training of basic RL brokers and unsupervised setting design.
Try the Paper and GitHub Web page. All credit score for this analysis goes to the researchers of this venture. Additionally, don’t neglect to observe us on Twitter and be a part of our Telegram Channel and LinkedIn Group. For those who like our work, you’ll love our publication.. Don’t Overlook to affix our 55k+ ML SubReddit.
[FREE AI WEBINAR] Implementing Clever Doc Processing with GenAI in Monetary Providers and Actual Property Transactions– From Framework to Manufacturing
Nazmi Syed is a consulting intern at MarktechPost and is pursuing a Bachelor of Science diploma on the Indian Institute of Expertise (IIT) Kharagpur. She has a deep ardour for Information Science and actively explores the wide-ranging purposes of synthetic intelligence throughout numerous industries. Fascinated by technological developments, Nazmi is dedicated to understanding and implementing cutting-edge improvements in real-world contexts.


