


Multi-agent pathfinding (MAPF), inside pc science and robotics, offers with the issue of routing a number of brokers, reminiscent of robots, to their particular person objectives inside a shared surroundings. These brokers should discover collision-free paths whereas sustaining a excessive degree of effectivity. MAPF is essential for purposes reminiscent of automated warehouses, visitors administration, and drone fleets. The complexity of the issue will increase with the variety of brokers, making real-time options needed for sensible use.
A major problem researchers face in MAPF is managing the complexity and computational demand of routing a number of brokers with out collisions, particularly because the variety of brokers will increase. The computational issue of fixing MAPF optimally makes it NP-hard, which means it’s nearly inconceivable to discover a completely optimum resolution in an inexpensive time for large-scale issues. Conventional strategies wrestle with these points, usually counting on oversimplified assumptions or extreme computational sources. One other problem is the brokers’ restricted view of their surroundings, which makes decentralized decision-making troublesome with out a world view or real-time communication.
Through the years, researchers have explored a number of approaches to unravel MAPF. Rule-based solvers, graph-based strategies, and optimization methods reminiscent of minimal stream on graphs are widespread. These approaches try and simplify the issue by reworking it into one other, extra solvable kind of drawback or by making use of graph search methods to search out paths. More moderen strategies have integrated machine studying and deep reinforcement studying, the place brokers study from their surroundings and alter their paths accordingly. Nonetheless, these strategies usually require communication between brokers or depend on heuristics to reinforce efficiency, which provides layers of complexity to an already troublesome drawback.
The analysis staff from AIRI, the Federal Analysis Middle “Pc Science and Management” of the Russian Academy of Sciences, and the Moscow Institute of Physics and Expertise launched an revolutionary method to fixing MAPF known as MAPF-GPT. This technique stands out as a result of it makes use of a transformer-based mannequin educated by way of imitation studying. MAPF-GPT is decentralized, which means every agent makes selections independently, counting on native observations. In contrast to earlier strategies, MAPF-GPT doesn’t require communication between brokers or extra planning steps, making it extra scalable and environment friendly. The staff additionally used a big dataset of knowledgeable trajectories, permitting the mannequin to study from sub-optimal options and nonetheless carry out effectively in unseen environments.
In creating MAPF-GPT, the researchers created a complete dataset of sub-optimal MAPF options generated by current solvers. These options have been transformed into sequences of observations and actions, known as tokens, from which the mannequin might study. Utilizing a neural community structure generally known as transformers, MAPF-GPT might predict the proper actions for brokers primarily based on their observations. The native remark for every agent included the present map structure and the agent’s place relative to obstacles and different brokers. The mannequin was educated utilizing cross-entropy loss, which allowed it to optimize its decision-making course of primarily based on the noticed actions from knowledgeable knowledge. The researchers ensured that the dataset was various, containing over 1 billion observation-action pairs from a wide range of MAPF situations, together with mazes and random maps.
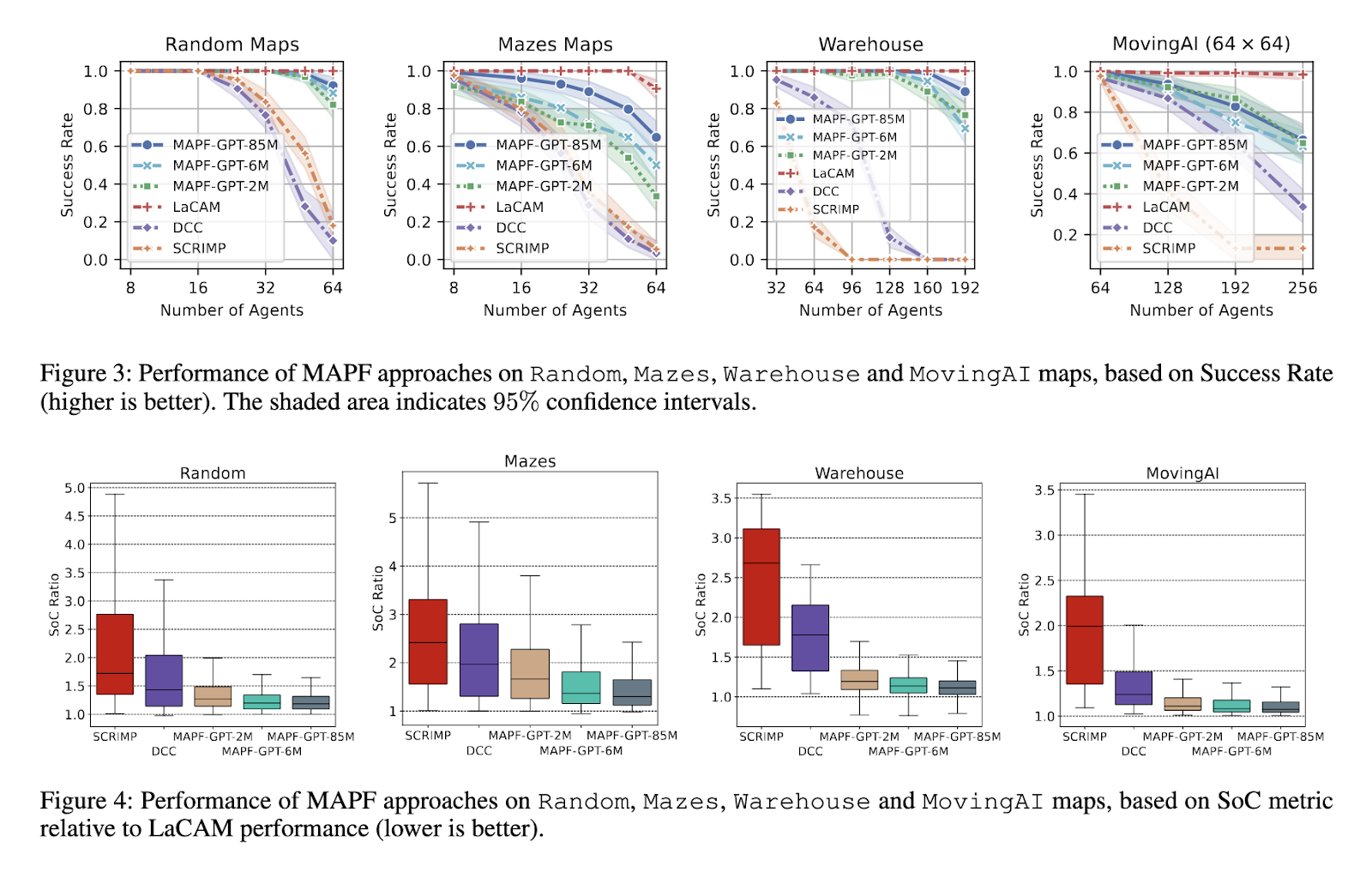
The efficiency of MAPF-GPT was completely evaluated towards different state-of-the-art decentralized MAPF solvers, together with DCC and SCRIMP. When it comes to success charge, MAPF-GPT outperformed these fashions throughout a number of situations. For instance, the most important model of the mannequin, MAPF-GPT-85M, achieved a considerably increased success charge on random maps and maze-like environments in comparison with its rivals. It was additionally proven that MAPF-GPT-85M solved issues involving as much as 192 brokers with linear scalability, which means its computational necessities elevated predictably because the variety of brokers grew. The mannequin proved to be 13 instances quicker than SCRIMP and eight instances quicker than DCC in high-agent environments. This was significantly evident in large-scale warehouse simulations, the place MAPF-GPT demonstrated each velocity and effectivity.
MAPF-GPT’s zero-shot studying capabilities have been one other exceptional achievement. The mannequin solved MAPF issues it had not encountered throughout its coaching, demonstrating a capability to generalize to new environments. In a lifelong MAPF situation, the place brokers obtain new objectives after reaching their preliminary ones, MAPF-GPT carried out impressively with out additional coaching. The mannequin outperformed conventional solvers like RHCR and learning-based fashions like FOLLOWER, significantly in warehouse simulations, the place its decentralized nature allowed it to keep up excessive throughput.
Total, the analysis launched a promising new method to fixing the advanced drawback of multi-agent pathfinding. By counting on imitation studying and a transformer-based structure, MAPF-GPT demonstrated vital benefits in velocity, scalability, and generalization over current strategies. The mannequin’s means to function with out inter-agent communication or extra heuristics gives a streamlined resolution for real-world purposes, significantly in environments with massive brokers.
Take a look at the Paper and GitHub. All credit score for this analysis goes to the researchers of this venture. Additionally, don’t neglect to comply with us on Twitter and be a part of our Telegram Channel and LinkedIn Group. Should you like our work, you’ll love our publication..
Don’t Neglect to affix our 50k+ ML SubReddit
Nikhil is an intern guide at Marktechpost. He’s pursuing an built-in twin diploma in Supplies on the Indian Institute of Expertise, Kharagpur. Nikhil is an AI/ML fanatic who’s at all times researching purposes in fields like biomaterials and biomedical science. With a robust background in Materials Science, he’s exploring new developments and creating alternatives to contribute.


