


The 3D occupancy prediction strategies confronted challenges in depth estimation, computational effectivity, and temporal data integration. Monocular imaginative and prescient struggled with depth ambiguities, whereas stereo imaginative and prescient required in depth calibration. Temporal fusion approaches, together with attention-based, WrapConcat-based, and plane-sweep-based strategies, tried to handle these points however typically lacked strong temporal geometry understanding. Many strategies implicitly leveraged temporal data, limiting their means to completely exploit 3D geometric constraints. Lengthy temporal fusion strategies, reminiscent of BEVFormer, struggled to successfully make the most of distant historic frames as a result of recurrent fusion processes. These limitations prompted the event of CVT-Occ to boost prediction accuracy whereas minimizing computational prices.
Researchers from Tsinghua College, Shanghai AI Lab, and UC Berkeley have developed CVT-Occ, a novel strategy for 3D occupancy prediction addressing challenges in monocular imaginative and prescient programs. The tactic leverages temporal fusion by geometric correspondence of voxels over time, sampling factors alongside the road of sight and integrating options from historic frames. This method constructs a price quantity function map to refine present quantity options, enhancing prediction accuracy. Validated on the Occ3D-Waymo dataset, CVT-Occ outperforms present state-of-the-art strategies whereas sustaining minimal computational prices. The analysis addresses limitations in depth estimation and stereo imaginative and prescient calibration, providing a promising answer for improved 3D occupancy prediction in varied functions.
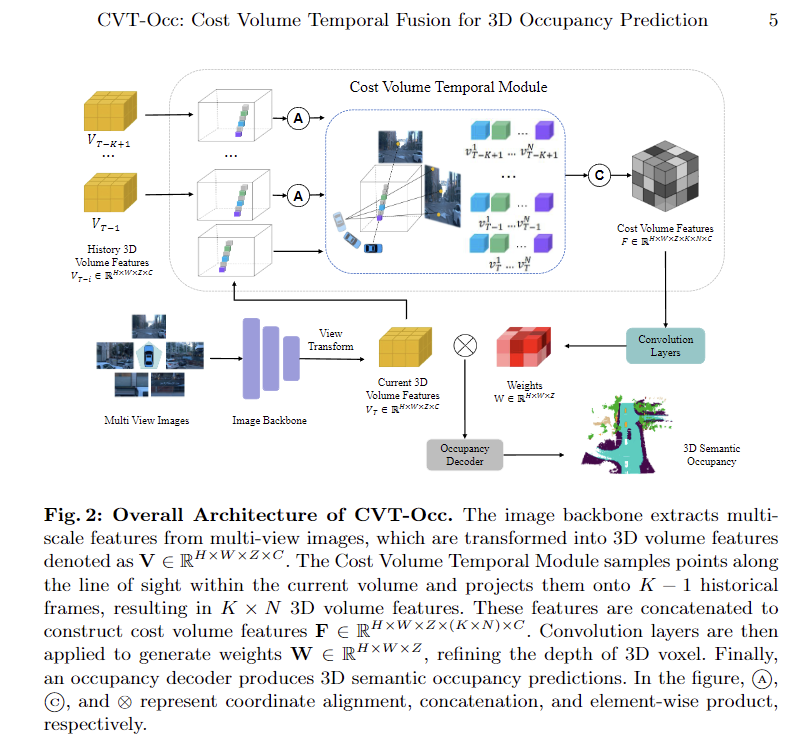
CVT-Occ methodology enhances 3D occupancy prediction by temporal fusion and geometric correspondences. The strategy constructs a price quantity function map by sampling factors alongside the road of sight and integrating historic body options. Geometric correspondences throughout temporal frames leverage the parallax impact to enhance depth estimation accuracy. A projection matrix transforms factors between ego-vehicle and international coordinate frames, enabling the extraction of complementary data from previous observations. The tactic mitigates depth ambiguity by using historic BEV options and projecting factors into the historic coordinate body.
Experimental validation on the Occ3D-Waymo dataset demonstrates CVT-Occ’s superior efficiency over present state-of-the-art strategies whereas sustaining low computational overhead. The strategy integrates with present fashions by changing authentic decoders with a 3D occupancy prediction decoder, guaranteeing efficient utilization of the fee quantity function map. This technique considerably improves predictions on object geometry and occupancy accuracy by its progressive use of temporal fusion, value quantity building, and historic function integration, making it a sturdy answer for 3D occupancy prediction duties.
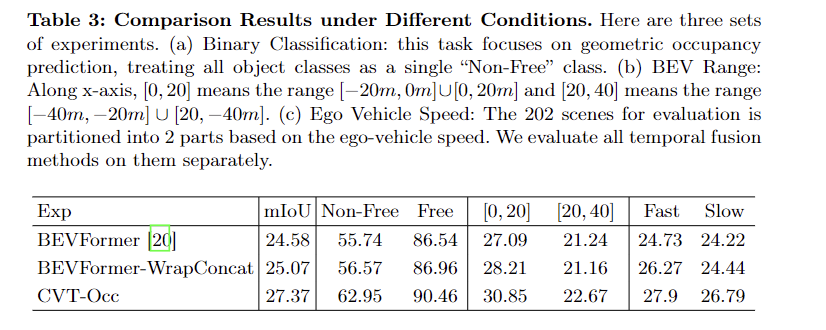
Outcomes from CVT-Occ reveal a 2.8% mIoU enchancment over BEVFormer in 3D occupancy prediction. The tactic excels in fast-moving eventualities, with +3.17 mIoU good points versus +2.57 in gradual situations. Efficiency enhancements exceed 4% for varied object courses. Ablation research spotlight the significance of longer time spans and efficient temporal fusion. CVT-Occ integrates data from all historic frames, overcoming the constraints of earlier strategies. It outperforms mainstream temporal fusion approaches, setting a brand new benchmark. The tactic’s success stems from complete temporal geometry understanding and efficient parallax impact utilization whereas sustaining low computational overhead.
In conclusion, CVT-Occ considerably enhances 3D occupancy prediction accuracy by efficient temporal fusion and geometric correspondence. The progressive value quantity function map, integrating historic body knowledge, proves essential for superior efficiency. The tactic’s lengthy temporal fusion capabilities and parallax utilization are key to its success. CVT-Occ opens new analysis avenues in 3D notion, with potential functions in reconstruction, robotics, and digital actuality. The strategy demonstrates the significance of leveraging total temporal sequences and integrating supplementary supervision for improved scene understanding, marking a considerable development within the discipline.
Try the Web page and GitHub. All credit score for this analysis goes to the researchers of this mission. Additionally, don’t overlook to observe us on Twitter and be a part of our Telegram Channel and LinkedIn Group. In case you like our work, you’ll love our e-newsletter..
Don’t Neglect to affix our 50k+ ML SubReddit

Shoaib Nazir is a consulting intern at MarktechPost and has accomplished his M.Tech twin diploma from the Indian Institute of Expertise (IIT), Kharagpur. With a powerful ardour for Information Science, he’s notably within the numerous functions of synthetic intelligence throughout varied domains. Shoaib is pushed by a want to discover the most recent technological developments and their sensible implications in on a regular basis life. His enthusiasm for innovation and real-world problem-solving fuels his steady studying and contribution to the sector of AI


