


3D occupancy estimation strategies initially relied closely on supervised coaching approaches requiring intensive 3D annotations, which restricted scalability. Self-supervised and weakly-supervised studying strategies emerged to handle this difficulty, using quantity rendering with 2D supervision alerts. These strategies, nonetheless, confronted challenges, together with the necessity for floor reality 6D poses and inefficiencies within the rendering course of. Current datasets additionally offered limitations, with points similar to self-occlusion affecting prediction accuracy.
To beat these challenges, researchers explored extra environment friendly paradigms for self-supervised 3D occupancy estimation. The sector sought options to cut back dependency on floor reality poses, enhance rendering effectivity, and develop strategies relevant to real-world situations with restricted information availability. This paper introduces GaussianOcc, a totally self-supervised method utilizing Gaussian splatting, designed to handle the constraints of earlier strategies and advance the sphere of 3D occupancy estimation.
Researchers from The College of Tokyo and South China College of Expertise developed GaussianOcc, a novel method for totally self-supervised and environment friendly 3D occupancy estimation utilizing Gaussian splatting. This methodology addresses limitations in current strategies, which regularly require floor reality 6D poses and depend on inefficient quantity rendering. GaussianOcc introduces two key elements: Gaussian Splatting for Projection (GSP) and Gaussian Splatting from Voxel Area (GSV). These improvements remove the necessity for floor reality poses throughout coaching and improve rendering effectivity. The proposed methodology demonstrates aggressive efficiency whereas reaching 2.7 occasions quicker coaching and 5 occasions quicker rendering in comparison with current approaches, making it extremely appropriate for sensible functions in 3D occupancy estimation.
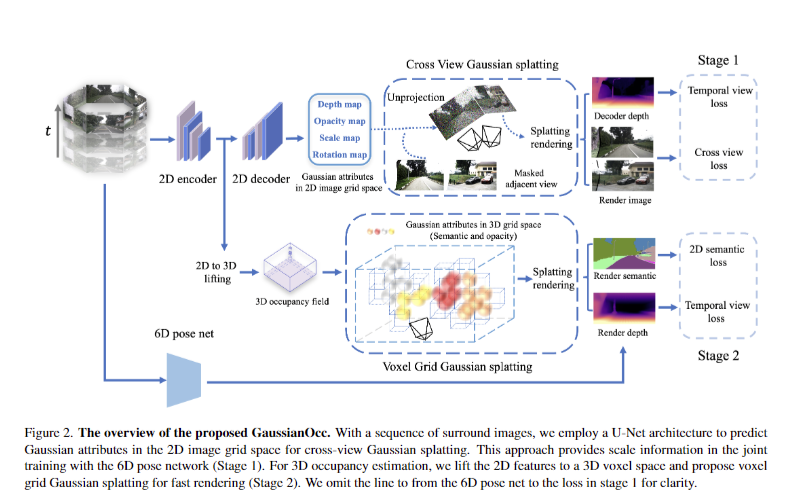
GaussianOcc’s methodology facilities on two progressive strategies,GSP and GSV. GSP gives correct scale info throughout coaching with out counting on floor reality 6D poses, using adjoining view projections to create a cross-view loss. This method optimizes mannequin efficiency and eliminates dependency on exterior pose information. GSV enhances rendering effectivity by performing Gaussian splatting immediately from the 3D voxel house, treating every vertex as a 3D Gaussian, and optimizing attributes inside the voxel house.
The methodology employs a U-Web structure with New-CRFs primarily based on the Swin Transformer for depth estimation and a 6D pose community in line with SurroundDepth. A scale-aware coaching technique is carried out, incorporating masking strategies and refinement processes to boost Gaussian splatting effectiveness and enhance depth estimation accuracy. Complete ablation research consider the affect of assorted elements, demonstrating the benefits of the proposed strategies by way of occupancy and depth metrics. This built-in method achieves environment friendly and self-supervised 3D occupancy estimation, addressing key limitations in current strategies.
GaussianOcc demonstrates superior efficiency in 3D occupancy estimation by means of self-supervised coaching and environment friendly rendering. The tactic achieves 2.7 occasions quicker coaching and 5 occasions quicker rendering in comparison with conventional quantity rendering. It outperforms current approaches in occupancy metrics (mIoU) and depth estimation. The GSP module permits correct scale info acquisition with out floor reality poses. Scale-aware coaching and erosion operations improve alignment and cut back artifacts. Splatting rendering maintains effectivity at increased resolutions, providing important benefits over quantity rendering. These developments set up GaussianOcc as a benchmark in self-supervised 3D occupancy estimation.
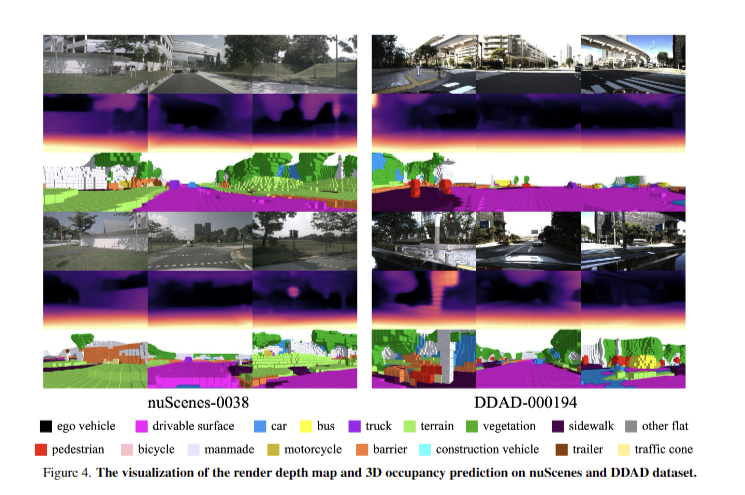
In conclusion, GaussianOcc introduces a totally self-supervised and environment friendly method for 3D occupancy estimation. The tactic demonstrates sturdy generalization skill throughout numerous environments, validated on nuScenes and DDAD datasets. Gaussian splatting in voxel grids surpasses conventional quantity rendering in accuracy and effectivity, considerably lowering computational prices. The analysis highlights the significance of correct depth estimation in occupancy prediction. GaussianOcc’s progressive use of a 6D pose community for self-supervised studying, coupled with its rendering developments, marks a big leap ahead in 3D scene understanding and reconstruction strategies.
Take a look at the Paper and GitHub. All credit score for this analysis goes to the researchers of this undertaking. Additionally, don’t overlook to comply with us on Twitter and be a part of our Telegram Channel and LinkedIn Group. In case you like our work, you’ll love our e-newsletter..
Don’t Overlook to hitch our 50k+ ML SubReddit
Here’s a extremely really useful webinar from our sponsor: ‘Constructing Performant AI Functions with NVIDIA NIMs and Haystack’

Shoaib Nazir is a consulting intern at MarktechPost and has accomplished his M.Tech twin diploma from the Indian Institute of Expertise (IIT), Kharagpur. With a powerful ardour for Knowledge Science, he’s notably within the numerous functions of synthetic intelligence throughout varied domains. Shoaib is pushed by a want to discover the newest technological developments and their sensible implications in on a regular basis life. His enthusiasm for innovation and real-world problem-solving fuels his steady studying and contribution to the sphere of AI


