


The sphere of robotic manipulation has witnessed a outstanding transformation with the emergence of vision-language-action (VLA) fashions. These superior computational frameworks have demonstrated important potential in executing advanced manipulation duties throughout various environments. Regardless of their spectacular capabilities, VLA fashions encounter substantial challenges in generalizing throughout novel contexts, together with completely different objects, environments, and semantic eventualities.
The basic limitation stems from present coaching methodologies, notably supervised fine-tuning (SFT), which predominantly depends on behavioral imitation by means of profitable motion rollouts. This strategy restricts fashions from creating a complete understanding of activity goals and potential failure mechanisms. Consequently, the fashions typically battle to adapt to nuanced variations and unexpected eventualities, highlighting the crucial want for extra subtle coaching methods.
Earlier analysis in robotic studying predominantly employed hierarchical planning methods, with fashions like Code as Insurance policies and EmbodiedGPT using giant language fashions and vision-language fashions to generate high-level motion plans. These approaches sometimes make the most of giant language fashions to create motion sequences, adopted by low-level controllers to resolve native trajectory challenges. Nonetheless, such methodologies show important limitations in ability adaptability and generalization throughout on a regular basis robotic manipulation duties.
VLA fashions have pursued two main approaches to motion planning: motion area discretization and diffusion fashions. The discretization strategy, exemplified by OpenVLA, includes uniformly truncating motion areas into discrete tokens, whereas preserving autoregressive language decoding goals. Diffusion fashions, conversely, generate motion sequences by means of a number of denoising steps moderately than producing singular stepwise actions. Regardless of these structural variations, these fashions persistently depend on supervised coaching utilizing profitable motion rollouts, which basically constrains their generalizability to novel manipulation eventualities.
Researchers from UNC Chapel-Hill, the College of Washington, and the College of Chicago introduce GRAPE (Generalizing Robotic Coverage through Desire Alignment), an revolutionary strategy designed to deal with elementary limitations in VLA mannequin coaching. GRAPE presents a strong trajectory-wise choice optimization (TPO) method that strategically aligns robotic insurance policies by implicitly modeling rewards from profitable and unsuccessful trial sequences. This technique permits enhanced generalizability throughout various manipulation duties by shifting past conventional coaching constraints.
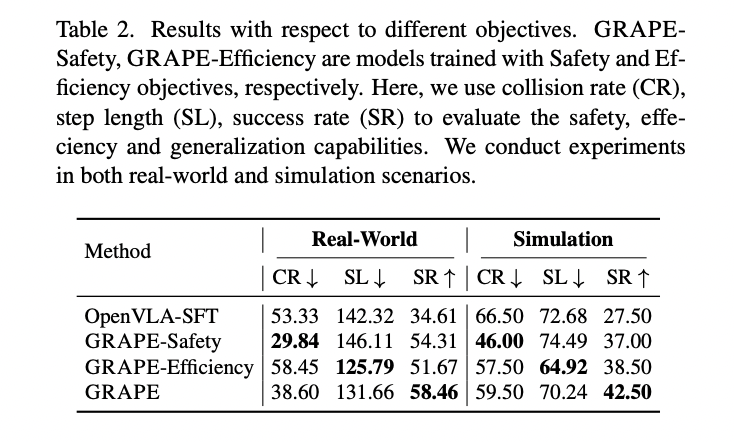
On the core of GRAPE’s strategy is a classy decomposition technique that breaks advanced manipulation duties into a number of impartial levels. The tactic affords unprecedented flexibility by using a big imaginative and prescient mannequin to suggest crucial keypoints for every stage and associating them with spatial-temporal constraints. These customizable constraints enable alignment with diverse manipulation goals, together with activity completion, robotic interplay security, and operational cost-efficiency, marking a big development in robotic coverage improvement.
The analysis workforce carried out complete evaluations of GRAPE throughout simulation and real-world robotic environments to validate its efficiency and generalizability. In simulation environments like Less complicated-Env and LIBERO, GRAPE demonstrated outstanding capabilities, outperforming current fashions Octo-SFT and OpenVLA-SFT by important margins. Particularly, in Less complicated-Env, GRAPE exceeded the efficiency of earlier fashions by a median of 24.48% and 13.57%, respectively, throughout varied generalization points together with topic, bodily, and semantic domains.
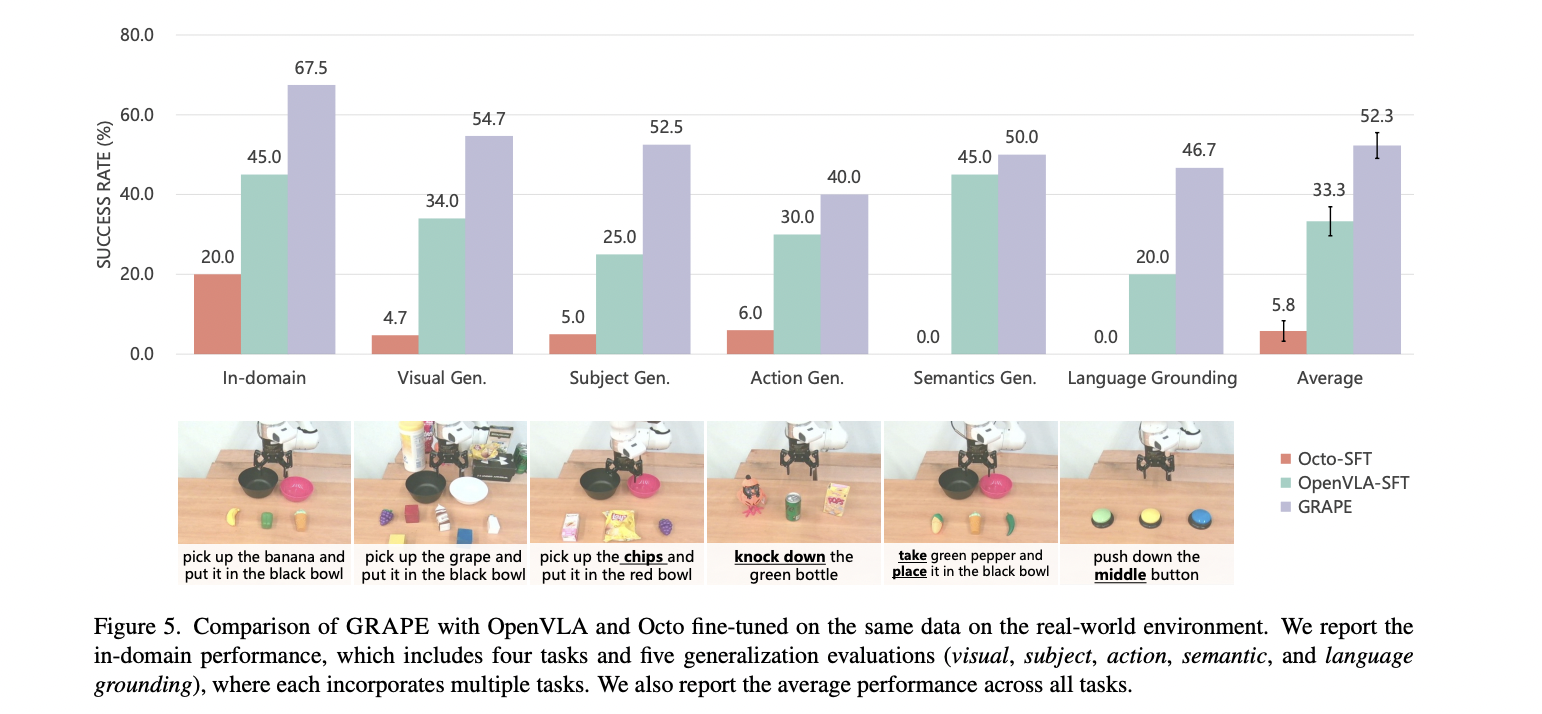
The actual-world experimental outcomes additional substantiated GRAPE’s effectiveness, with the mannequin showcasing distinctive adaptability throughout various activity eventualities. In in-domain duties, GRAPE achieved a 67.5% success charge, representing a considerable 22.5% enchancment over OpenVLA-SFT and dramatically surpassing Octo-SFT. Notably spectacular was GRAPE’s efficiency in difficult generalization duties, the place it maintained superior outcomes throughout visible, motion, and language grounding eventualities, with a powerful whole common success charge of 52.3% – a big 19% development over current approaches.
This analysis introduces GRAPE as a transformative answer to crucial challenges confronting VLA fashions, notably their restricted generalizability and flexibility throughout manipulation duties. By implementing a novel trajectory-level coverage alignment strategy, GRAPE demonstrates outstanding functionality in studying from each profitable and unsuccessful trial sequences. The methodology affords unprecedented flexibility in aligning robotic insurance policies with various goals, together with security, effectivity, and activity completion by means of revolutionary spatiotemporal constraint mechanisms. Experimental findings validate GRAPE’s important developments, showcasing substantial efficiency enhancements throughout in-domain and unseen activity environments.
Take a look at the Paper and GitHub Web page. All credit score for this analysis goes to the researchers of this venture. Additionally, don’t neglect to observe us on Twitter and be part of our Telegram Channel and LinkedIn Group. For those who like our work, you’ll love our e-newsletter.. Don’t Overlook to hitch our 60k+ ML SubReddit.
🚨 [Must Attend Webinar]: ‘Rework proofs-of-concept into production-ready AI purposes and brokers’ (Promoted)
Asjad is an intern marketing consultant at Marktechpost. He’s persuing B.Tech in mechanical engineering on the Indian Institute of Expertise, Kharagpur. Asjad is a Machine studying and deep studying fanatic who’s at all times researching the purposes of machine studying in healthcare.


