


Fixing sequential duties requiring a number of steps poses important challenges in robotics, notably in real-world functions the place robots function in unsure environments. These environments are sometimes stochastic, that means robots face variability in actions and observations. A core purpose in robotics is to enhance the effectivity of robotic programs by enabling them to deal with long-horizon duties, which require sustained reasoning over prolonged intervals of time. Resolution-making is additional sophisticated by robots’ restricted sensors and partial observability of their environment, which limit their skill to grasp their setting fully. Consequently, researchers constantly search new strategies to boost how robots understand, study, and act, making robots extra autonomous and dependable.
Researchers’ main drawback on this space facilities round a robotic’s incapability to study from previous actions effectively. Robots depend on strategies like reinforcement studying (RL) to enhance efficiency. Nevertheless, RL requires many trials, usually within the thousands and thousands, for a robotic to turn into proficient at finishing duties. That is impractical, particularly in partially observable environments the place robots can’t work together constantly as a result of related dangers. Furthermore, present programs, corresponding to decision-making fashions powered by massive language fashions (LLMs), battle to retain previous interactions, forcing robots to repeat errors or relearn methods they’ve already encountered. This incapability to use prior information hinders their effectiveness in complicated, long-term duties.
Whereas RL and LLM-based brokers have proven promise, they exhibit a number of limitations. Reinforcement studying, as an illustration, is very data-intensive and calls for important guide effort for designing reward capabilities. Alternatively, LLM-based brokers, that are used for producing motion sequences, usually lack the power to refine their actions based mostly on previous experiences. Current strategies have integrated critics to judge the feasibility of choices. Nevertheless, they nonetheless fall brief in a single vital space: the power to retailer and retrieve helpful information from previous interactions. This hole implies that whereas these programs can carry out nicely in short-term or static duties, their efficiency degrades in dynamic environments, requiring continuous studying and adaptation.
Researchers from Rice College have launched the RAG-Modulo framework. This novel system enhances LLM-based brokers by equipping them with an interplay reminiscence. This reminiscence shops previous selections, permitting robots to recall and apply related experiences when confronted with related duties sooner or later. By doing so, the system improves decision-making capabilities over time. Additional, the framework makes use of a set of critics to evaluate the feasibility of actions, providing suggestions based mostly on syntax, semantics, and low-level coverage. These critics be certain that the robotic’s actions are executable and contextually applicable. Importantly, this strategy eliminates the necessity for in depth guide tuning, because the reminiscence mechanically adapts and tunes prompts for the LLM based mostly on previous experiences.
The RAG-Modulo framework maintains a dynamic reminiscence of the robotic’s interactions, enabling it to retrieve previous actions and outcomes as in-context examples. When going through a brand new job, the framework attracts upon this reminiscence to information the robotic’s decision-making course of, thus avoiding repeated errors and enhancing effectivity. The critics embedded inside the system act as verifiers, offering real-time suggestions on the viability of actions. For instance, if a robotic makes an attempt to carry out an infeasible motion, corresponding to selecting up an object in an occupied house, the critics will counsel corrective steps. Because the robotic continues to carry out duties, its reminiscence expands, turning into extra able to dealing with more and more complicated sequences. This strategy ensures continuous studying with out frequent reprogramming or human intervention.
The efficiency of RAG-Modulo has been rigorously examined in two benchmark environments: BabyAI and AlfWorld. The system demonstrated a marked enchancment over baseline fashions, attaining increased success charges and decreasing the variety of infeasible actions. In BabyAI-Synth, as an illustration, RAG-Modulo achieved successful price of 57%, whereas the closest competing mannequin, LLM-Planner, reached solely 43%. The efficiency hole widened within the extra complicated BabyAI-BossLevel, the place RAG-Modulo attained a 57% success price in comparison with LLM-Planner’s 37%. Equally, within the AlfWorld setting, RAG-Modulo exhibited superior decision-making effectivity, with fewer failed actions and shorter job completion instances. Within the AlfWorld-Seen setting, the framework achieved a mean in-executability price of 0.09 in comparison with 0.16 for LLM-Planner. These outcomes reveal the system’s skill to generalize from prior experiences and optimize robotic efficiency.
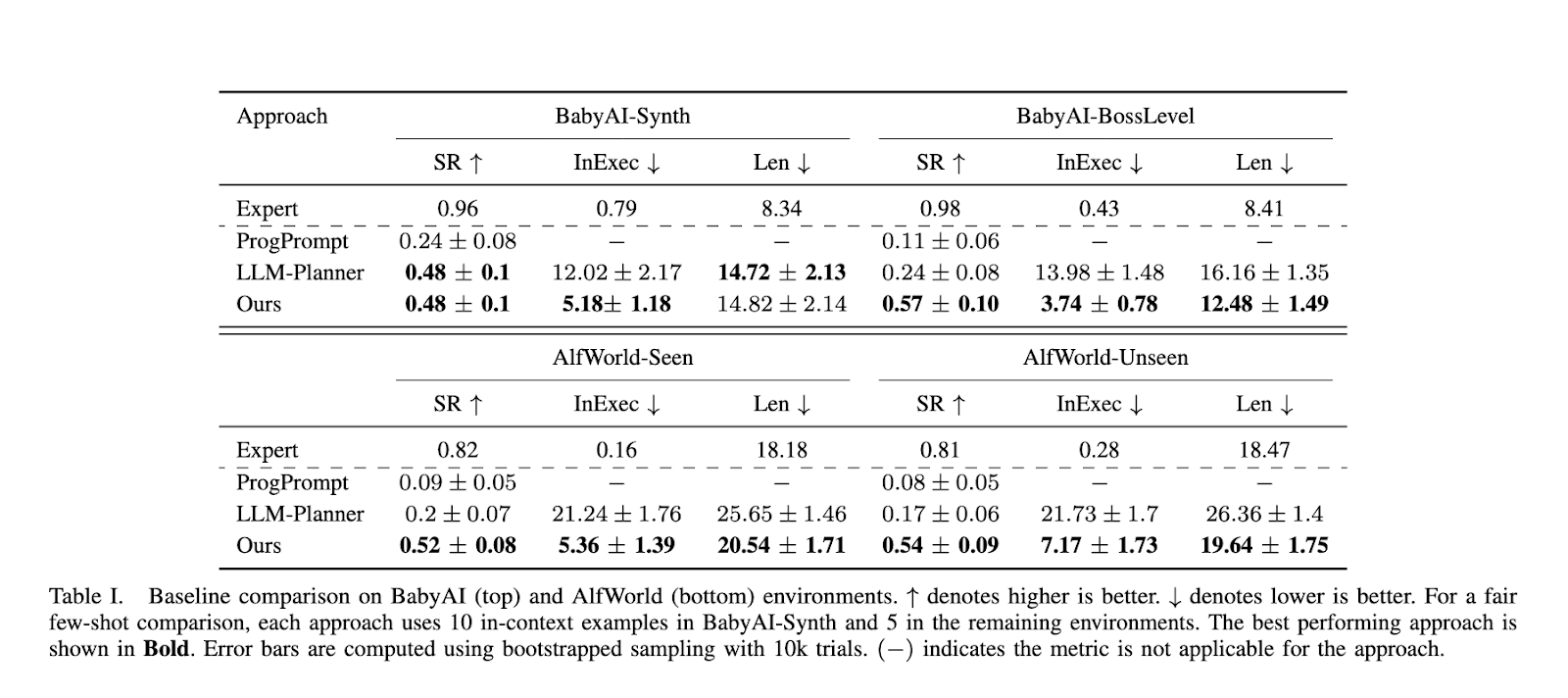
Concerning job execution, RAG-Modulo additionally lowered the typical episode size, highlighting its skill to perform duties extra effectively. In BabyAI-Synth, the typical episode size was 12.48 steps, whereas different fashions required over 16 steps to finish the identical duties. This discount in episode size is critical as a result of it will increase operational effectivity and lowers the computational prices related to working the language mannequin for longer durations. By shortening the variety of actions wanted to realize a purpose, the framework reduces the general complexity of job execution whereas making certain that the robotic learns from each choice it makes.
The RAG-Modulo framework presents a considerable leap ahead in enabling robots to study from previous interactions and apply this data to future duties. By addressing the vital problem of reminiscence retention in LLM-based brokers, the system supplies a scalable answer for dealing with complicated, long-horizon duties. Its skill to couple reminiscence with real-time suggestions from critics ensures that robots can constantly enhance with out requiring extreme guide intervention. This development marks a big step towards extra autonomous, clever robotic programs able to studying and evolving in real-world environments.
Take a look at the Paper. All credit score for this analysis goes to the researchers of this challenge. Additionally, don’t overlook to comply with us on Twitter and be part of our Telegram Channel and LinkedIn Group. For those who like our work, you’ll love our publication..
Don’t Overlook to hitch our 50k+ ML SubReddit
Nikhil is an intern marketing consultant at Marktechpost. He’s pursuing an built-in twin diploma in Supplies on the Indian Institute of Know-how, Kharagpur. Nikhil is an AI/ML fanatic who’s at all times researching functions in fields like biomaterials and biomedical science. With a robust background in Materials Science, he’s exploring new developments and creating alternatives to contribute.


